

Dynamic vision picking is a technique that enables robots to manipulate objects in unstructured environments using visual feedback. It involves using cameras and sensors to detect the position, orientation, shape and size of the objects, and then planning and executing a motion that can grasp them without collision. Robot dynamic vision picking can be applied to various domains, such as logistics, manufacturing, agriculture and service. It can improve the efficiency, accuracy and flexibility of robot manipulation tasks.
3D vision systems and tools using flexible end-of-arm (EOAT) systems are utilized to configure many bin setups:
- Can remove tier sheets, used to separate part layers
- Able to perform accurate final part placements
- Quality control capabilities for parts that are mismatched with defined specifications
- Capable of working with tall bins that must be emptied
- Can discover appropriate pick patterns for bin parts that were placed randomly
- Able to deal with a variety of part weights, shapes, materials and sizes
Robotic Painting System Retrofit
MWES retrofitted and upgraded a robotic painting system to replace an existing manual painting...

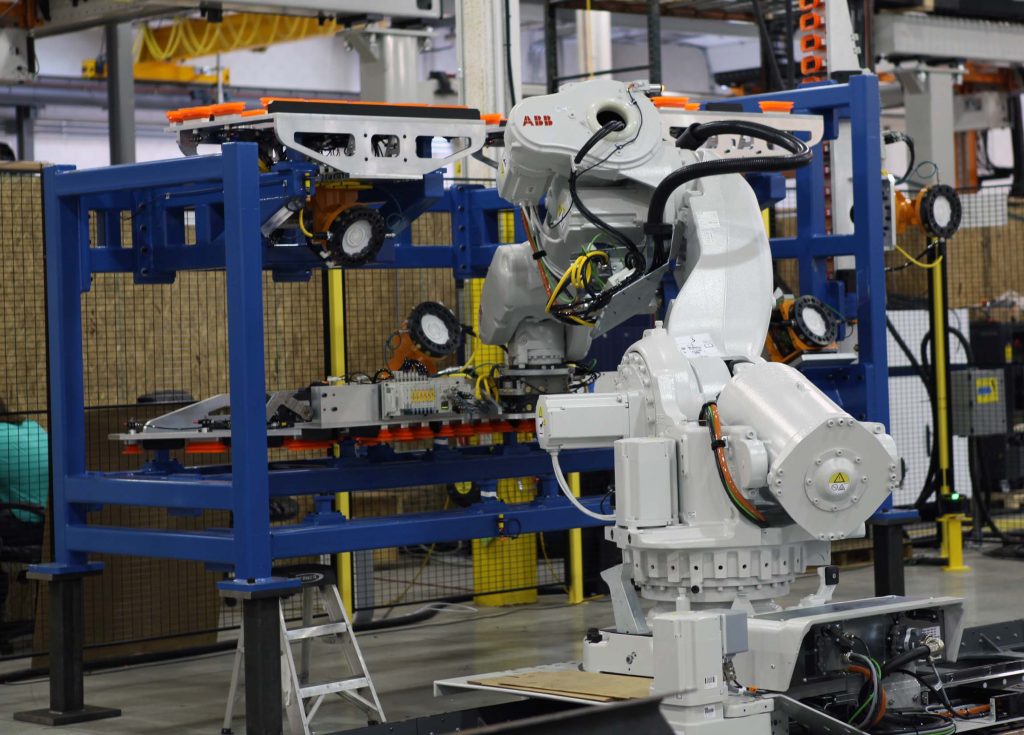
Robotic Palletizing & Automated Guided Vehicle
MWES provided this firm with a track-mounted robotic palletizing system that includes a pallet-handling...
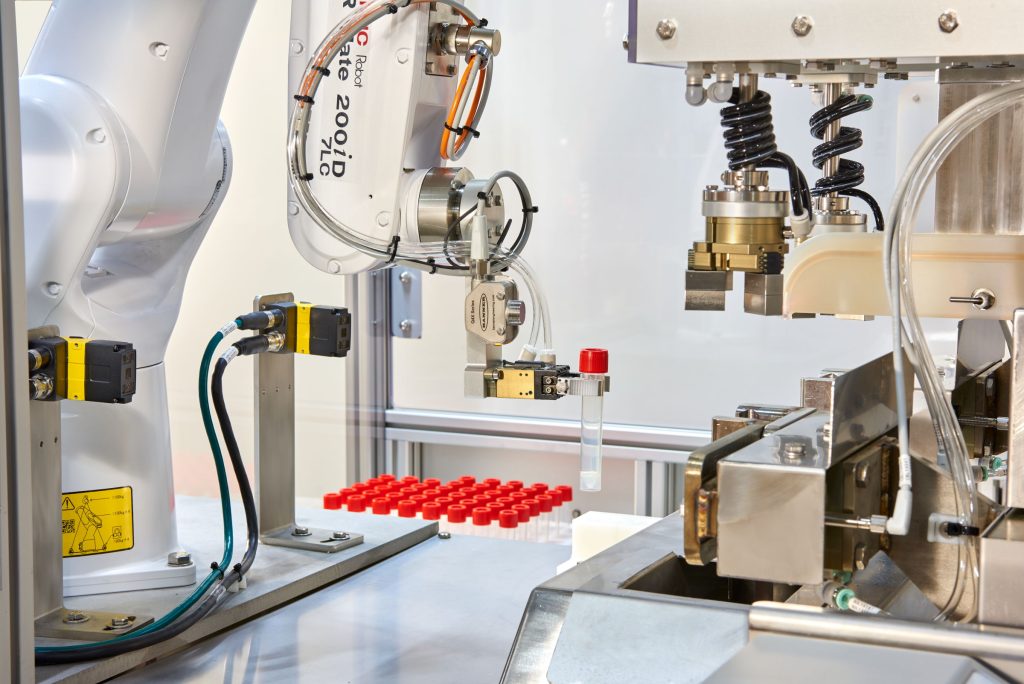
Robotic Vial Filling for Increased Speed & Precision
MWES built a robotic medical sample-handling machine for a healthcare equipment supplier for...

Robot Die-Cast Machine Tending Automation
MWES provided a manufacturer with an automated robot die-cast tending system for producing...

Random Bin & Dynamic Conveyor Picking System
MWES provided an industrial equipment manufacturer with an automated robotic picking conveyor...
Robotic Press Brake Automated Metal Bending
MWES provided this firm with a robotic press brake tending automation system that would perform...
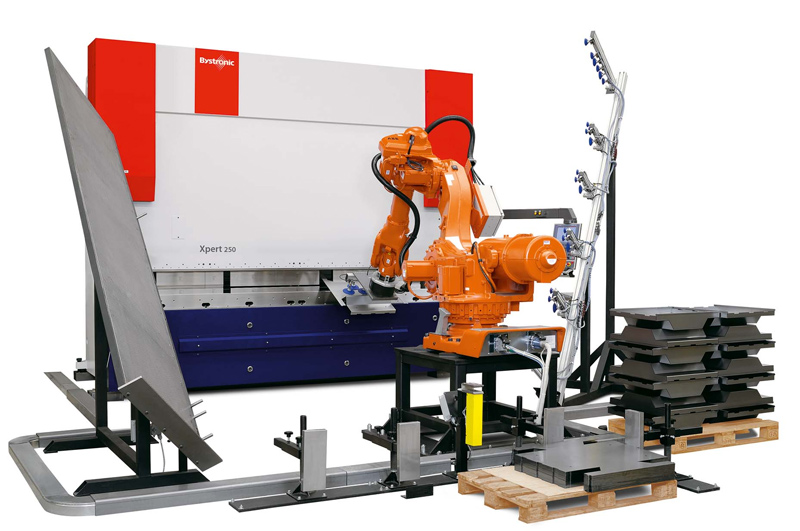
Robotic Press Brake Tending
MWES provided this firm with a robotic Bystronics press brake tending system for handling large...

Robotic Press Brake Tending System
MWES provided this manufacturer with a robotic press brake automation system that assembles...

Robotic Flame Treater System
MWES reprogrammed and converted an existing robot cell into one that performs flame-treating...